1.066906e-05 with absolute error < 1e-12[1] 1.066906e-05[1] 1.061693e-05Bayesics
Last compiled Friday Jul 10, 2026
In frequentist statistic, “probability” is synonym for
long-term frequency under repeated sampling

Probability reflects incomplete information.
Quoting Finetti (1974)
Probabilistic reasoning — always to be understood as subjective — merely stems from our being uncertain about something.
The joint density of data \(\boldsymbol{Y}\) and parameters \(\boldsymbol{\theta}\) is
\[\begin{align*} p(\boldsymbol{Y}, \boldsymbol{\theta}) = p(\boldsymbol{Y} \mid \boldsymbol{\theta}) p(\boldsymbol{\theta}) = p(\boldsymbol{\theta} \mid \boldsymbol{Y}) p(\boldsymbol{Y}) \end{align*}\] where the marginal \(p(\boldsymbol{Y}) = \int_{\boldsymbol{\Theta}} p(\boldsymbol{Y}, \boldsymbol{\theta}) \mathrm{d} \boldsymbol{\theta}\).
Using Bayes’ theorem, the posterior density is
\[\begin{align*} \color{#D55E00}{p(\boldsymbol{\theta} \mid \boldsymbol{Y})} = \frac{\color{#0072B2}{p(\boldsymbol{Y} \mid \boldsymbol{\theta})} \times \color{#56B4E9}{p(\boldsymbol{\theta})}}{\color{#E69F00}{\int p(\boldsymbol{Y} \mid \boldsymbol{\theta}) p(\boldsymbol{\theta})\mathrm{d} \boldsymbol{\theta}}}, \end{align*}\]
meaning that \[\color{#D55E00}{\text{posterior}} \propto \color{#0072B2}{\text{likelihood}} \times \color{#56B4E9}{\text{prior}}\]
Evaluating the marginal likelihood \(\color{#E69F00}{p(\boldsymbol{Y})}\), is challenging when \(\boldsymbol{\theta}\) is high-dimensional.
By Bayes’ rule, we can consider updating the posterior by adding terms to the likelihood, noting that for independent \(\boldsymbol{y}_1\) and \(\boldsymbol{y}_2\), \[\begin{align*} p(\boldsymbol{\theta} \mid \boldsymbol{y}_1, \boldsymbol{y}_2) \propto p(\boldsymbol{y}_2 \mid \boldsymbol{\theta}) p(\boldsymbol{\theta} \mid \boldsymbol{y}_1) \end{align*}\] The posterior is be updated in light of new information.
A binomial variable with probability of success \(\theta \in [0,1]\) has mass function \[\begin{align*} f(y; \theta) = \binom{n}{y} \theta^y (1-\theta)^{n-y}, \qquad y = 0, \ldots, n. \end{align*}\] Moments of the number of successes out of \(n\) trials are \[\mathsf{E}(Y \mid \theta) = n \theta, \quad \mathsf{Va}(Y \mid \theta) = n \theta(1-\theta).\]
The binomial coefficient \(\binom{n}{y}=n!/\{(n-y)!y!\}\), where \(n!=\Gamma(n+1)\).
The beta distribution with shapes \(\alpha>0\) and \(\beta>0\), denoted \(\mathsf{beta}(\alpha,\beta)\), has density \[f(y) = \frac{\Gamma(\alpha+\beta)}{\Gamma(\alpha)\Gamma(\beta)}y^{\alpha - 1}(1-y)^{\beta - 1}, \qquad y \in [0,1]\]
We write \(Y \sim \mathsf{binom}(n, \theta)\) for \(\theta \in [0,1]\); the likelihood is \[L(\theta; y) = \binom{n}{y} \theta^y(1-\theta)^{n-y}.\]
Consider a beta prior, \(\theta \sim \mathsf{beta}(\alpha, \beta)\), with density \[ p(\theta) = \frac{\Gamma(\alpha + \beta)}{\Gamma(\alpha)\Gamma(\beta) }\theta^{\alpha-1}(1-\theta)^{\beta - 1}. \]
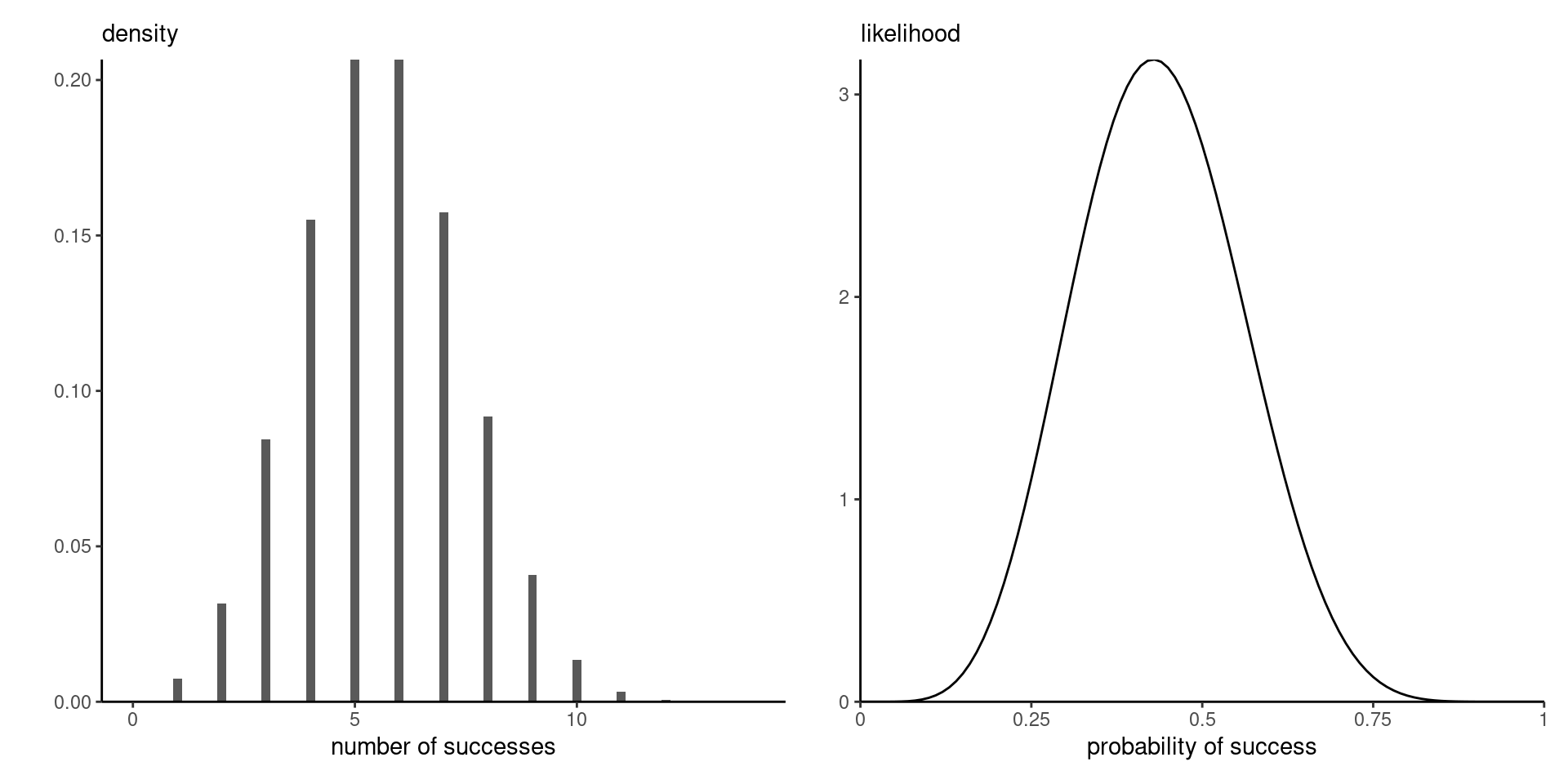
The binomial distribution is discrete with support \(0, \ldots, n\), whereas the likelihood is continuous over \(\theta \in [0,1]\).
Figure 1: Binomial density function (left) and scaled likelihood function (right).
If the density or mass function integrates to 1 over the range of \(Y\), the integral of the likelihood over \(\theta\) does not.
Any term not a function of \(\theta\) can be dropped, since it will absorbed by the normalizing constant. The posterior density is proportional to
\[\begin{align*} L(\theta; y)p(\theta) & \stackrel{\theta}{\propto} \theta^{y}(1-\theta)^{n-y} \times \theta^{\alpha-1} (1-\theta)^{\beta-1} \\& =\theta^{y + \alpha - 1}(1-\theta)^{n-y + \beta - 1} \end{align*}\] the kernel of a beta density with shape parameters \(y + \alpha\) and \(n-y + \beta\).
The symbol \(\propto\), for proportionality, means dropping all terms not an argument of the left hand side.
The marginal likelihood for the \(Y \mid P=p \sim \mathsf{binom}(n,p)\) model with prior \(P \sim \mathsf{beta}(\alpha, \beta)\) is \[\begin{align*} p_{Y}(y) = \binom{n}{y} \frac{\mathrm{beta}(\alpha + y, \beta + n - y)}{\mathrm{beta}(\alpha, \beta)}, \quad y \in\{0, \ldots,n\}. \end{align*}\] where \(\mathrm{beta}(\alpha, \beta) = \Gamma(\alpha)\Gamma(\beta)/\Gamma(\alpha+\beta)\) is the beta function.
Consider the following sampling mechanism, which lead to \(k\) successes out of \(n\) independent trials, with the same probability of success \(\theta\).
Two likelihoods that are proportional, up to a constant not depending on unknown parameters, yield the same evidence.
In all cases, \(L(\theta; y) \stackrel{\theta}{\propto} \theta^k(1-\theta)^{n-k}\), so these yield the same inference for Bayesian.
For a more in-depth discussion, see Section 6.3.2 of Casella & Berger (2002)
We could approximate the \(\color{#E69F00}{\text{marginal likelihood}}\) through either
In more complicated models, we will try to sample observations by bypassing completely this calculation.
The likelihood terms can be small (always less than one and decreasing for discrete data), so watch out for numerical overflow when evaluating normalizing constants.
1.066906e-05 with absolute error < 1e-12[1] 1.066906e-05[1] 1.061693e-05In multi-parameter models, additional integration is needed to get the marginal posterior
\[p(\theta_j \mid \boldsymbol{y}) = \int p(\boldsymbol{\theta} \mid \boldsymbol{y}) \mathrm{d} \boldsymbol{\theta}_{-j}.\]
Marginalization is trivial when we have a joint sample: simply keep the column corresponding to \(\theta_j\).
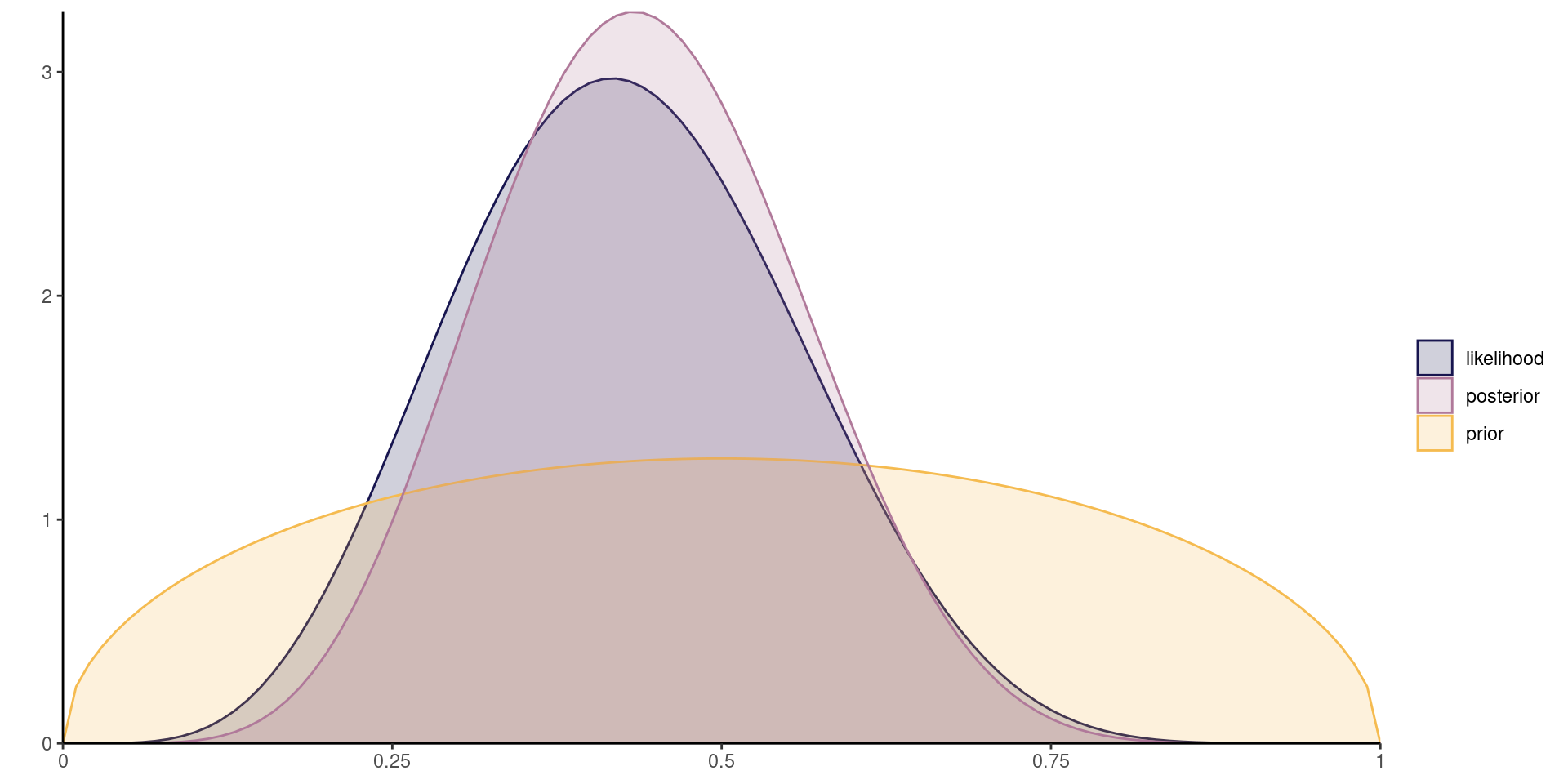
Figure 2: Scaled Binomial likelihood for six successes out of 14 trials, \(\mathsf{beta}(3/2, 3/2)\) prior and corresponding posterior distribution from a beta-binomial model.
We could define the posterior simply as the normalized product of the likelihood and some prior function.
The prior function need not even be proportional to a density function (i.e., integrable as a function of \(\boldsymbol{\theta}\)).
For example,
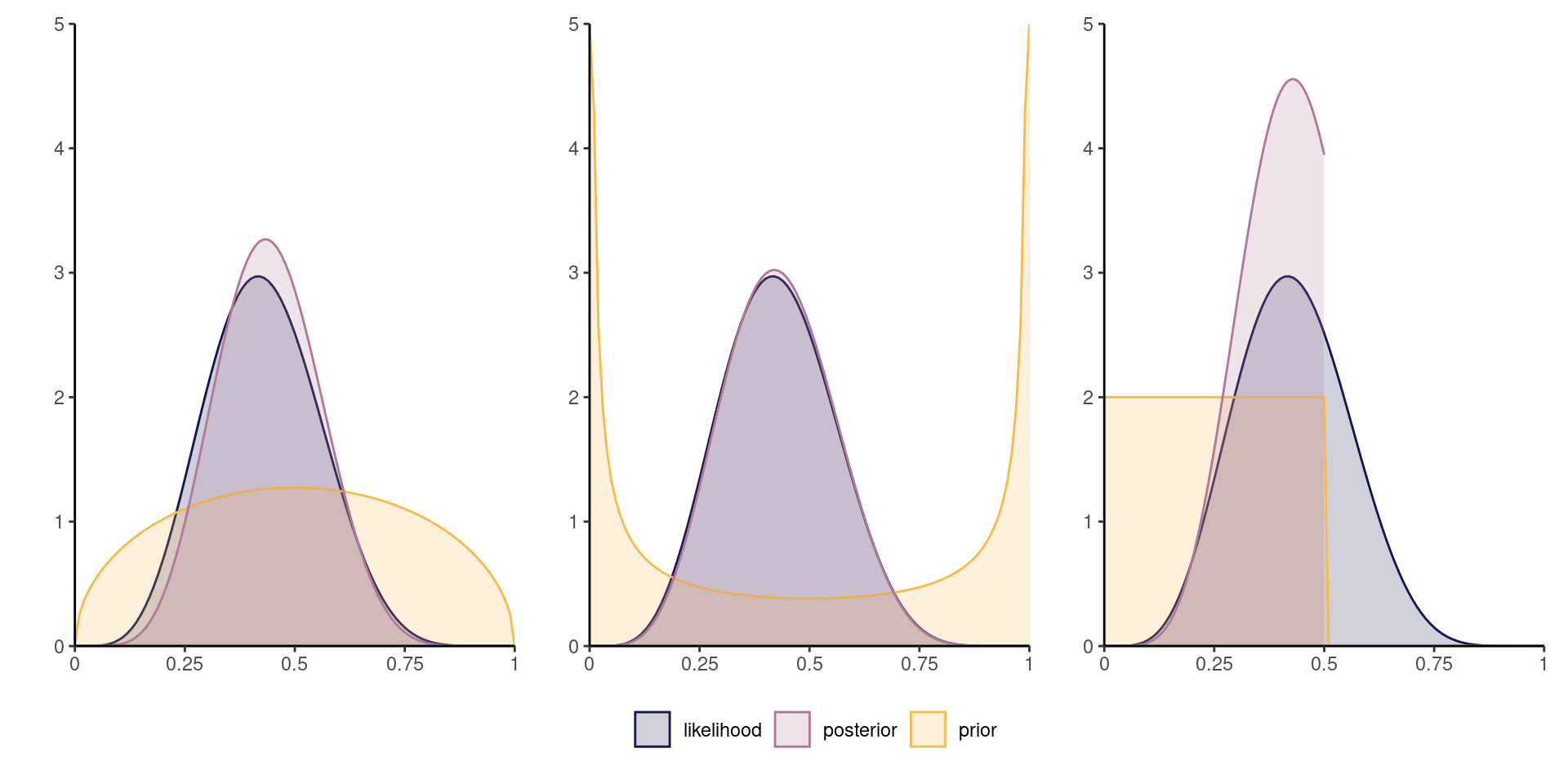
Figure 3: Scaled binomial likelihood for six successes out of 14 trials, with \(\mathsf{beta}(3/2, 3/2)\) (left), \(\mathsf{beta}(1/4, 1/4)\) (middle) and \(\mathsf{unif}[0,1/2]\) (right) priors and posterior density.
The posterior is beta, with expected value \[\begin{align*} \mathsf{E}(\theta \mid y) &= w\frac{y}{n} + (1-w) \frac{\alpha}{\alpha + \beta}, \\ w&=\frac{n}{n+\alpha+\beta} \end{align*}\] a weighted average of
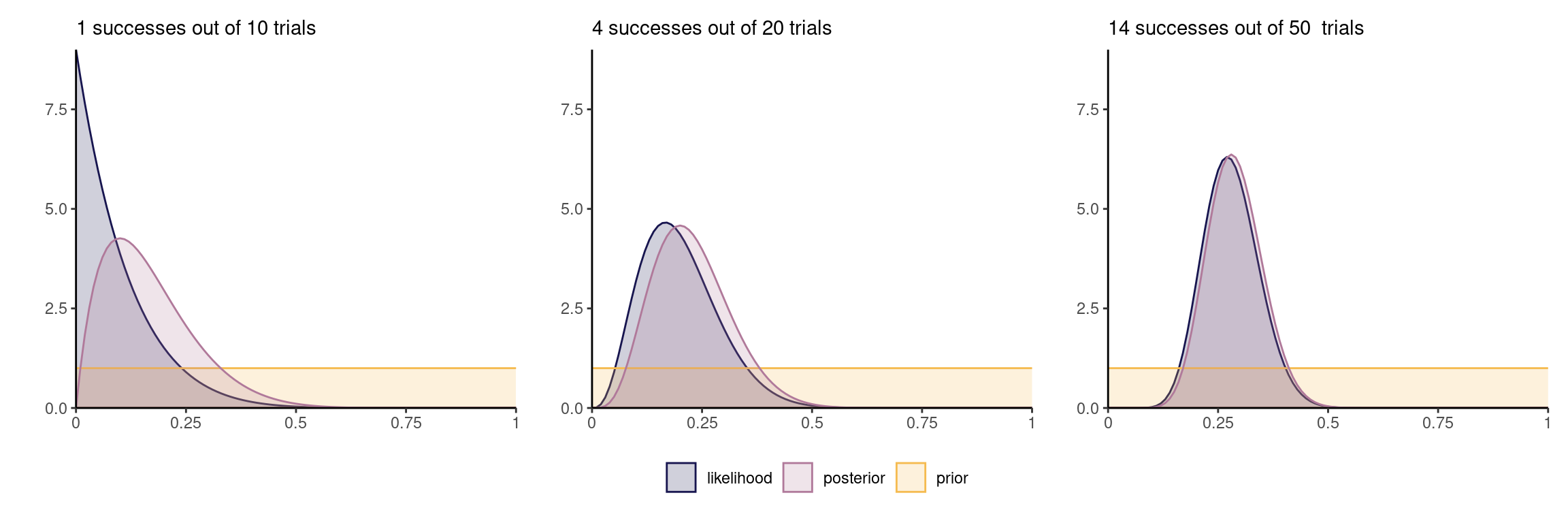
Except for stubborn priors, the likelihood contribution dominates in large samples. The impact of the prior is then often negligible.
Figure 4: Beta posterior and binomial likelihood with a uniform prior for increasing number of observations (from left to right).
Suppose that we have models \(\mathcal{M}_m\) \((m=1, \ldots, M)\) to be compared, with parameter vectors \(\boldsymbol{\theta}^{(m)}\) and data vector \(\boldsymbol{y}\) and prior probability \(\Pr(\mathcal{M}_m)\).
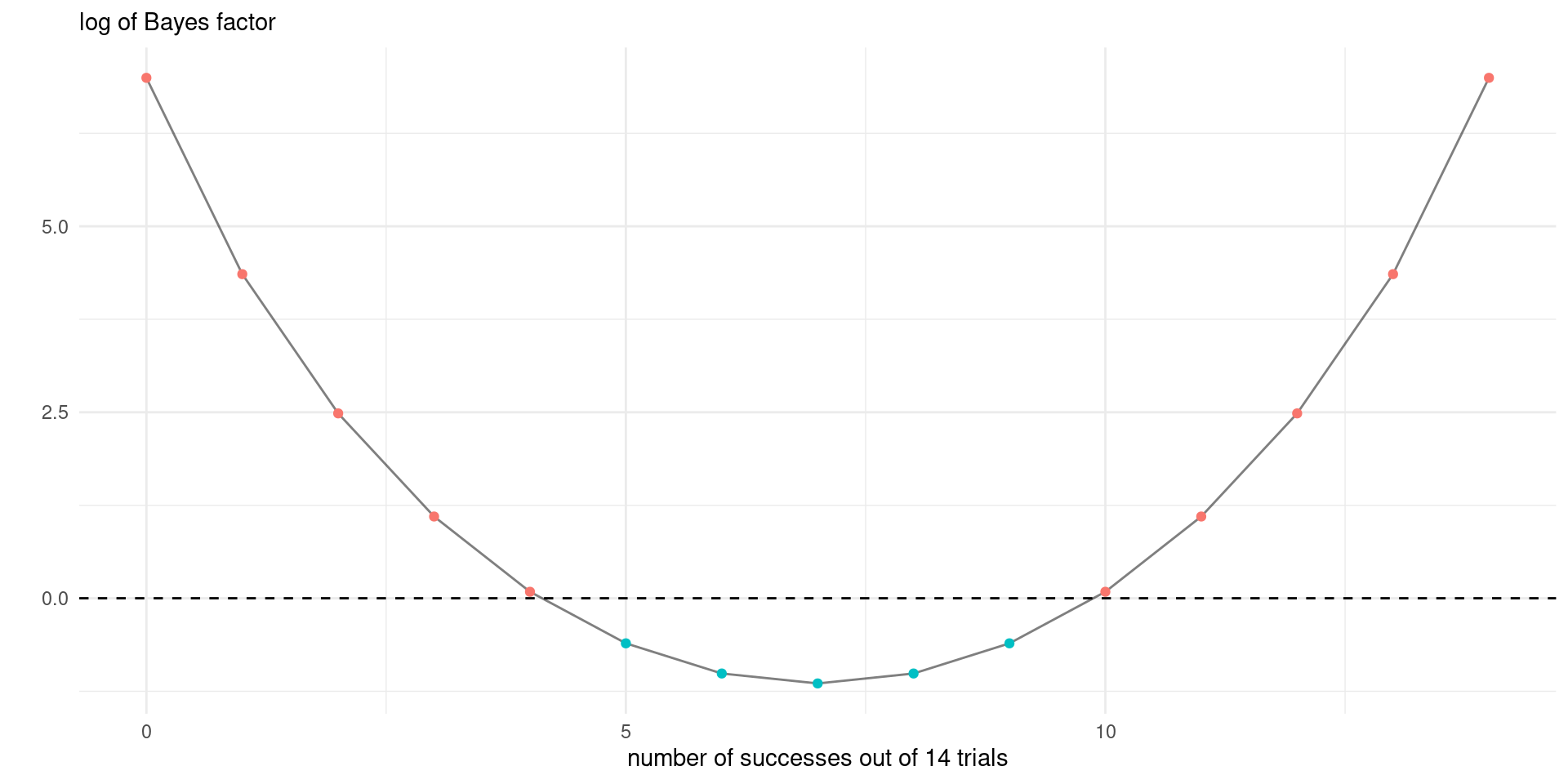
The \(\color{#c38f16}{\text{posterior odds}}\) for models \(\mathcal{M}_i\) vs \(\mathcal{M}_j\) is \[\begin{align*} \color{#c38f16}{\frac{\Pr(\mathcal{M}_i \mid \boldsymbol{y})}{\Pr(\mathcal{M}_j \mid \boldsymbol{y})}} = \color{#6e948c}{\frac{p(\boldsymbol{y} \mid \mathcal{M}_i)}{p(\boldsymbol{y} \mid \mathcal{M}_j)}} \color{#122c43}{\frac{\Pr(\mathcal{M}_i)}{\Pr(\mathcal{M}_j)}} \end{align*}\] equal to the \(\color{#6e948c}{\text{Bayes factor}}\) \(\mathsf{BF}_{ij}\) times the \(\color{#122c43}{\text{prior odds}}\).
The \(\color{#6e948c}{\text{Bayes factor}}\) is the ratio of marginal likelihoods, as \[\begin{align*} p(\boldsymbol{y} \mid \mathcal{M}_i) = \int p(y \mid \boldsymbol{\theta}^{(i)}, \mathcal{M}_i) p( \boldsymbol{\theta}^{(i)} \mid \mathcal{M}_i) \mathrm{d} \boldsymbol{\theta}^{(i)}. \end{align*}\] Values of \(\mathsf{BF}_{ij}>1\) correspond to model \(\mathcal{M}_i\) being more likely than \(\mathcal{M}_j\).
Consider two models with \(Y \mid P^{(i)}=p \sim \mathsf{binom}(n, p)\) and
The output of the Bayesian learning will be either of:
Most of the field revolves around the creation of algorithms that either
Define the \(\color{#D55E00}{\text{posterior predictive}}\), \[\begin{align*} p(y_{\text{new}}\mid \boldsymbol{y}) = \int_{\boldsymbol{\Theta}} p(y_{\text{new}} \mid \boldsymbol{\theta}) \color{#D55E00}{p(\boldsymbol{\theta} \mid \boldsymbol{y})} \mathrm{d} \boldsymbol{\theta} \end{align*}\] and the \(\color{#56B4E9}{\text{prior predictive}}\) \[\begin{align*} p(y_{\text{new}}) = \int_{\boldsymbol{\Theta}} p(y_{\text{new}} \mid \boldsymbol{\theta}) \color{#56B4E9}{p(\boldsymbol{\theta})} \mathrm{d} \boldsymbol{\theta} \end{align*}\] is useful for determining whether the prior is sensical.
Given the \(\mathsf{beta}(a, b)\) prior or posterior, the predictive for \(n_{\text{new}}\) trials is beta-binomial with density \[\begin{align*} p(y_{\text{new}}\mid y) &= \int_0^1 \binom{n_{\text{new}}}{y_{\text{new}}} \frac{\theta^{a + y_{\text{new}}-1}(1-\theta)^{b + n_{\text{new}} - y_{\text{new}}-1}}{ \mathrm{Be}(a, b)}\mathrm{d} \theta \\&= \binom{n_{\text{new}}}{y_{\text{new}}} \frac{\mathrm{Be}(a + y_{\text{new}}, b + n_{\text{new}} - y_{\text{new}})}{\mathrm{Be}(a, b)} \end{align*}\]
Replace \(a=y + \alpha\) and \(b=n-y + \beta\) to get the posterior predictive distribution.
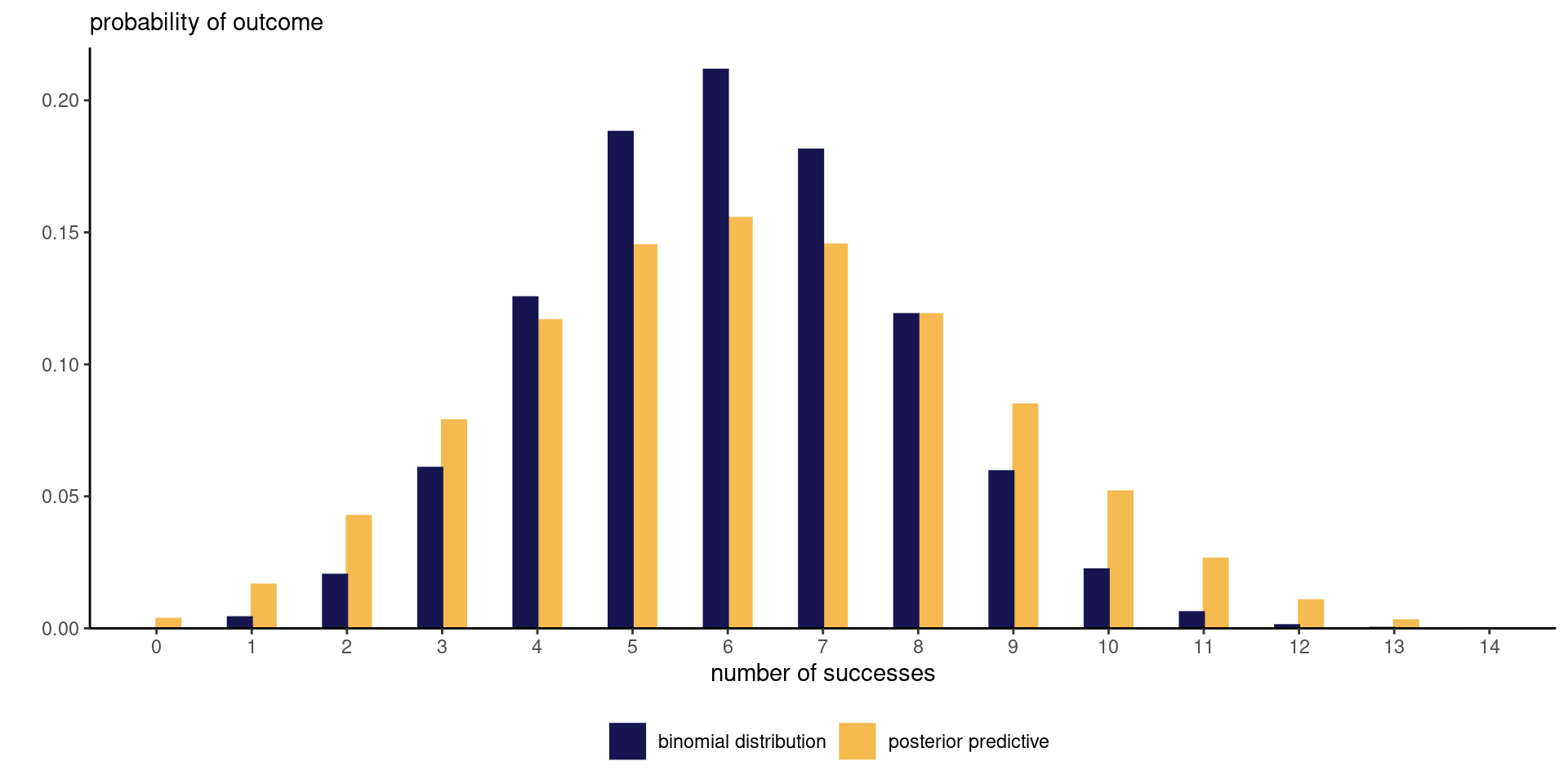
Figure 5: Beta-binomial posterior predictive distribution with corresponding binomial mass function evaluated at the maximum likelihood estimator.
The posterior predictive carries over the parameter uncertainty so will typically be wider and overdispersed relative to the corresponding distribution.
Given a draw \(\theta^*\) from the posterior, simulate a new observation from the distribution \(f(y_{\text{new}}; \theta^*)\).
The beta-binomial is used to model overdispersion in binary regression models.
The output of a Bayesian procedure is a distribution for the parameters given the data.
We may wish to return different numerical summaries (expected value, variance, mode, quantiles, …)
The question: which point estimator to return?
A loss function \(c(\boldsymbol{\theta}, \boldsymbol{\upsilon}): \boldsymbol{\Theta} \mapsto \mathbb{R}^k\) assigns a weight to each value \(\boldsymbol{\theta}\), corresponding to the regret or loss.
The point estimator \(\widehat{\boldsymbol{\upsilon}}\) is the minimizer of the expected loss \[\begin{align*} \widehat{\boldsymbol{\upsilon}} &= \mathop{\mathrm{argmin}}_{\boldsymbol{\upsilon}}\mathsf{E}_{\boldsymbol{\Theta} \mid \boldsymbol{Y}}\{c(\boldsymbol{\theta}, \boldsymbol{v})\} \\&=\mathop{\mathrm{argmin}}_{\boldsymbol{\upsilon}} \int_{\boldsymbol{\Theta}} c(\boldsymbol{\theta}, \boldsymbol{\upsilon})p(\boldsymbol{\theta} \mid \boldsymbol{y}) \mathrm{d} \boldsymbol{\theta} \end{align*}\]
In a univariate setting, the most widely used point estimators are
The posterior mode \(\boldsymbol{\theta}_{\mathrm{map}} = \mathrm{argmax}_{\boldsymbol{\theta}} p(\boldsymbol{\theta} \mid \boldsymbol{y})\) is the maximum a posteriori or MAP estimator.
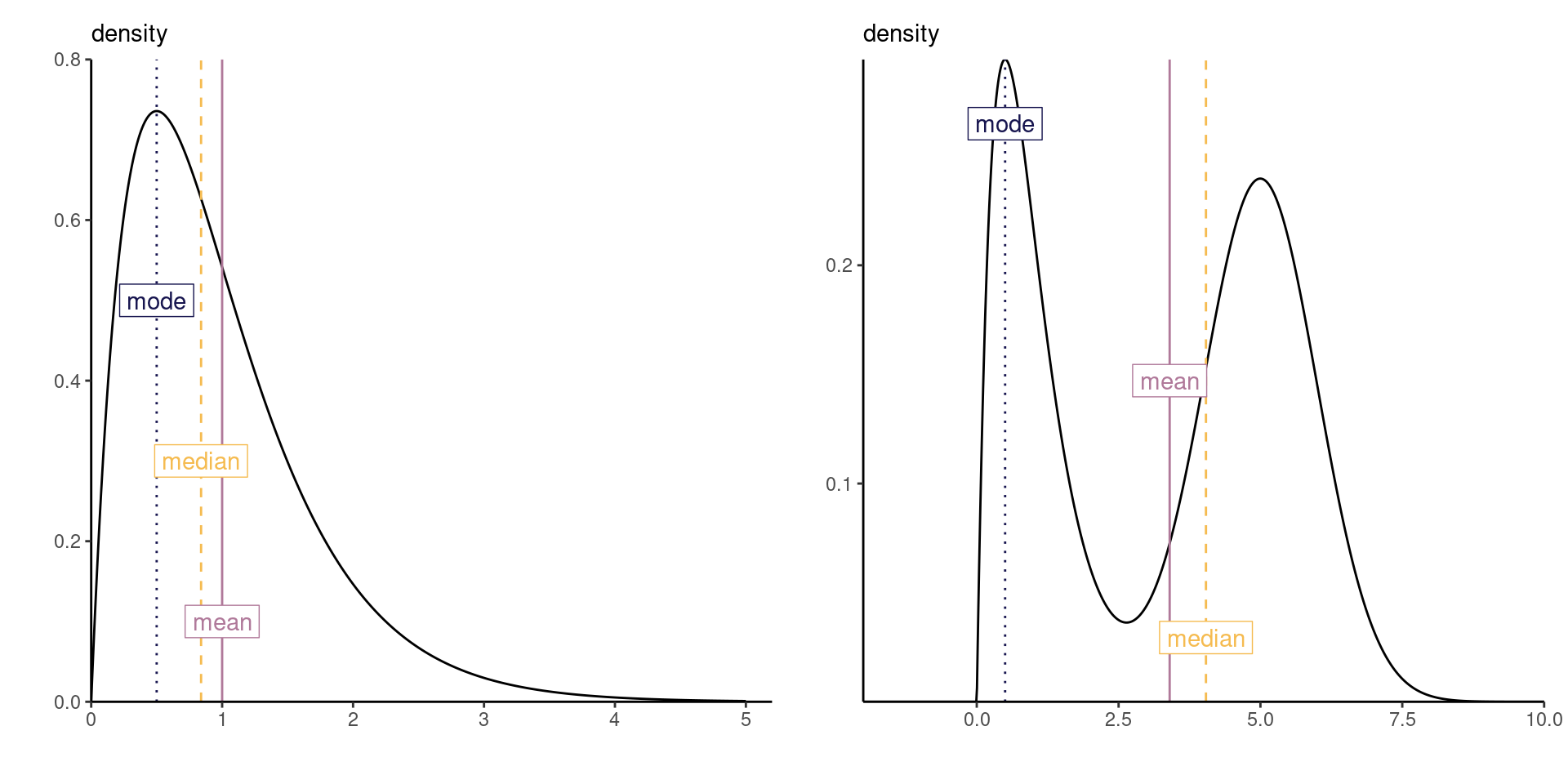
Figure 6: Point estimators from a right-skewed distribution (left) and from a multimodal distribution (right).
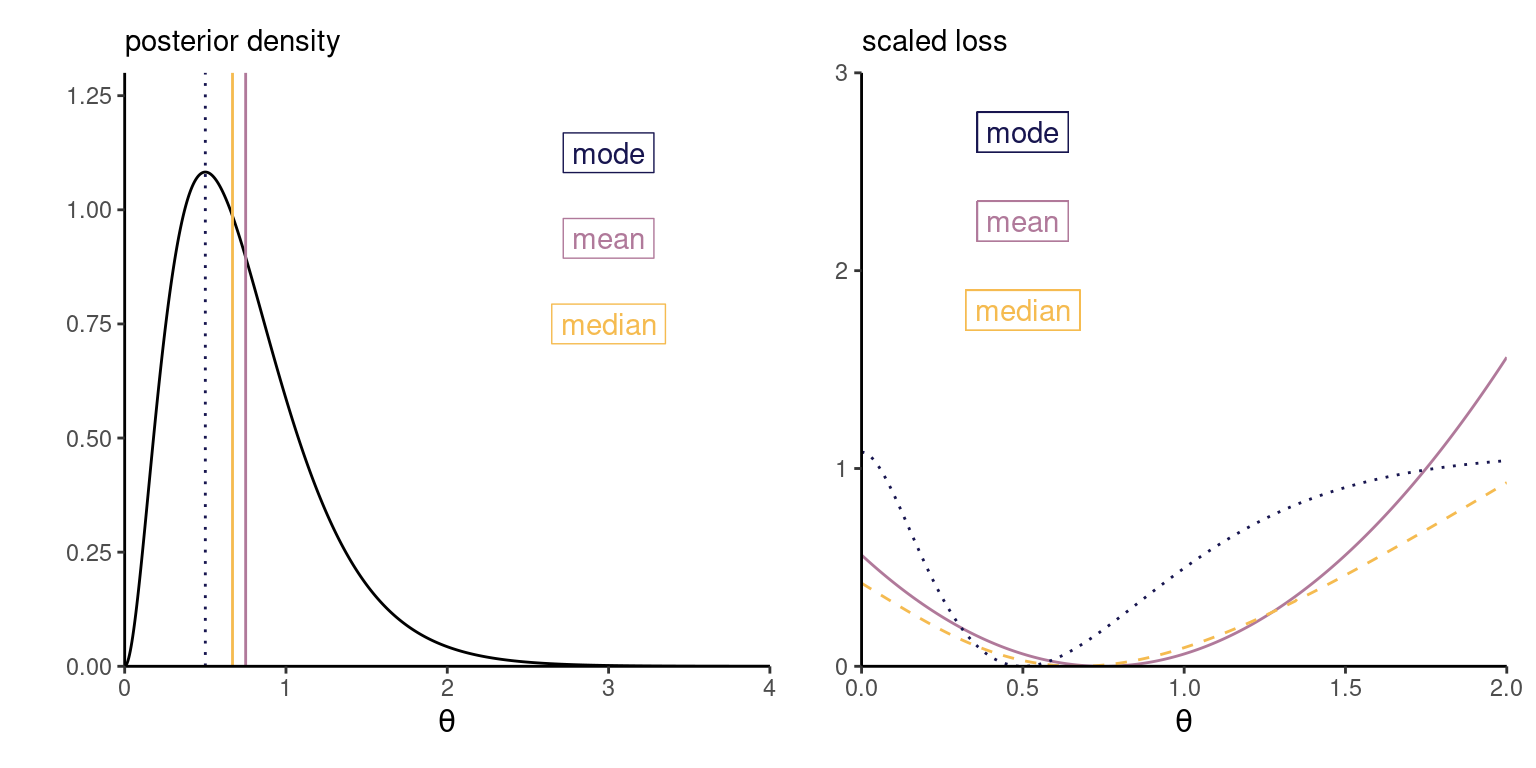
Figure 7: Posterior density with mean, mode and median point estimators (left) and corresponding loss functions, scaled to have minimum value of zero (right).
The freshman dream comes true!
A \(1-\alpha\) credible region give a set of parameter values which contains the “true value” of the parameter \(\boldsymbol{\theta}\) with probability \(1-\alpha\).
Caveat: McElreath (2020) suggests the term ‘compatibility’, as it
returns the range of parameter values compatible with the model and data.
Multiple \(1-\alpha\) intervals, most common are
If we accept to have more than a single interval, the highest posterior density region can be a set of disjoint intervals. The HDPI is more sensitive to the number of draws and more computationally intensive (see R package HDinterval). See Hyndman (1996) for computations.
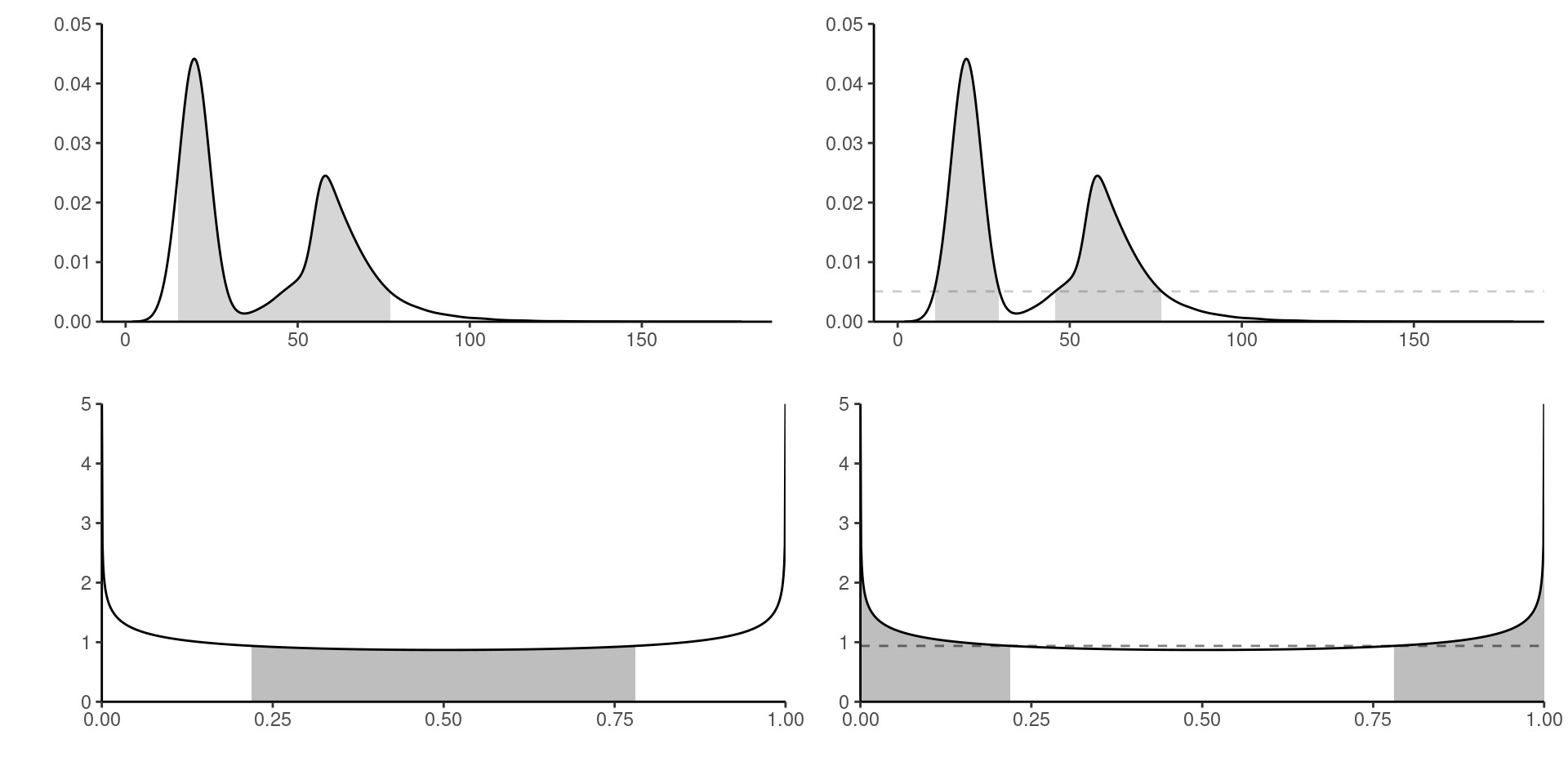
Figure 8: Density plots with 89% (top) and 50% (bottom) equitailed or central credible (left) and highest posterior density (right) regions for two data sets, highlighted in grey.
5.5% 94.5%
0.0246807 0.9999980 [1] 0.02925205 0.99999844 begin end
[1,] -0.04331573 0.2800577
[2,] 0.47816030 1.1423868
attr(,"credMass")
[1] 0.89
attr(,"height")
[1] 0.3898784![]()